Welcome to DiffRP⚙️!#
DiffRP aims to provide an easy-to-use programming interface for rendering and differentiable rendering pipelines.
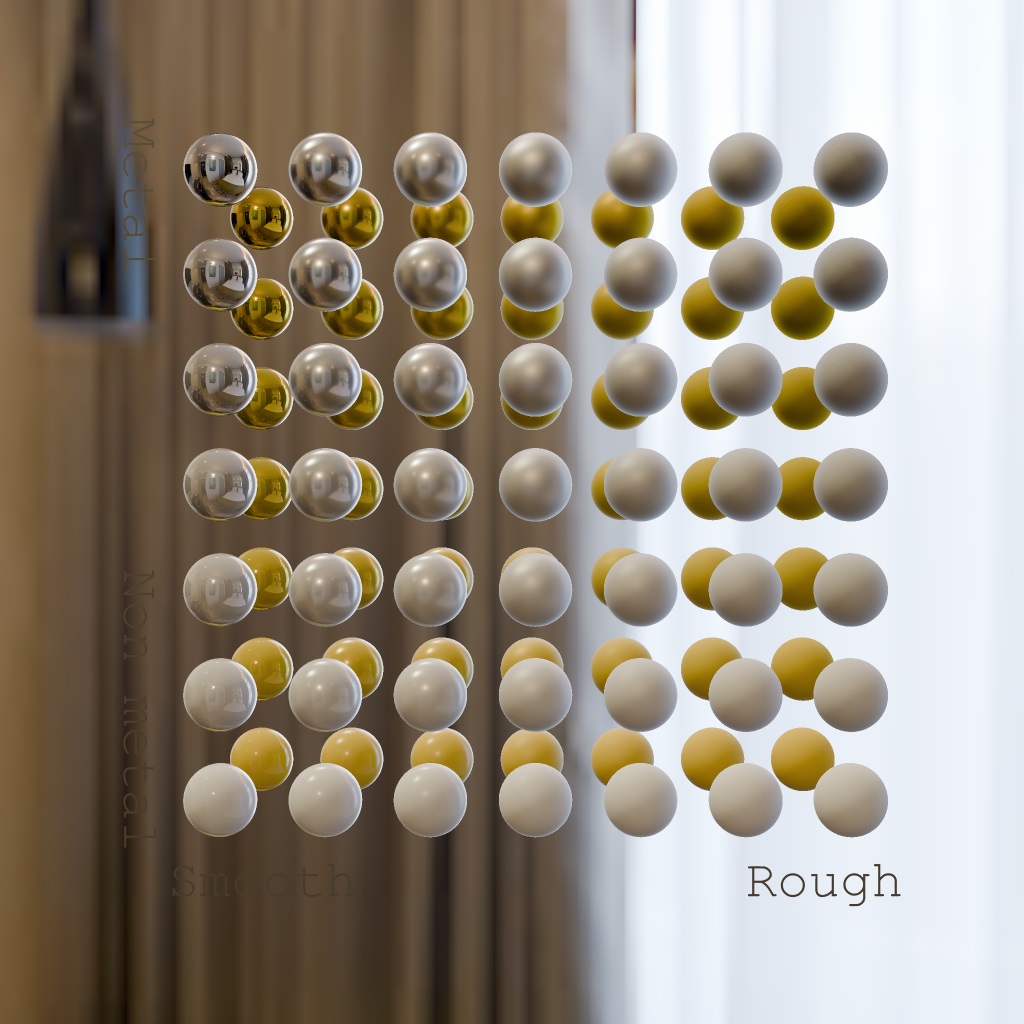
The glTF MetalRoughSpheresNoTextures scene rendered with DiffRP PBR rasterization.#

The glTF ABeautifulGame scene rendered with DiffRP Path Tracing.#
Installation#
The package can be installed by:
pip install diffrp
Or for latest development:
pip install git+https://github.com/eliphatfs/diffrp
Note
DiffRP depends on PyTorch (torch). The default version pip resolves to may not come with the cuda version you want. It is recommended to install PyTorch before you install DiffRP so you can choose the version you like.
Note
DiffRP rendering is based on CUDA GPUs. You can develop without one, but a CUDA GPU is required to run the code.
Other Dependencies#
If you use rasterization in DiffRP, you need to have the CUDA development kit set up as we use the nvdiffrast backend. See also https://nvlabs.github.io/nvdiffrast/#installation.
If you want to use hardware ray tracing in DiffRP, you need to install torchoptix by pip install torchoptix. See also the hardware and driver requirements https://github.com/eliphatfs/torchoptix?tab=readme-ov-file#requirements.
If you plan on using plugins in DiffRP (currently when you compute tangents), gcc is required in path. This is already fulfilled in most Linux and Mac distributions. For Windows I recommend the Strawberry Perl (https://strawberryperl.com/) distribution of gcc.
Get Started#
Rendering attributes of a mesh programmingly is incredibly simple with DiffRP compared to conventional render engines like Blender and Unity.
In this section, we will get started to render a simple procedural mesh.
First, let’s import what we would need:
import diffrp
import trimesh.creation
from diffrp.utils import *
We now create a icosphere and render the camera space normal map, where RGB color values in \([0, 1]\) map linearly to \([-1, 1]\) in normal XYZ vectors.
The first run may take some time due to compiling and importing the nvdiffrast backend. Following calls would be fast.
# create the mesh (cpu)
mesh = trimesh.creation.icosphere(radius=0.8)
# initialize the DiffRP scene
scene = diffrp.Scene()
# register the mesh, load vertices and faces arrays to GPU
scene.add_mesh_object(diffrp.MeshObject(diffrp.DefaultMaterial(), gpu_f32(mesh.vertices), gpu_i32(mesh.faces)))
# default camera at [0, 0, 3.2] looking backwards
camera = diffrp.PerspectiveCamera()
# create the SurfaceDeferredRenderSession, a deferred-rendering rasterization pipeline session
rp = diffrp.SurfaceDeferredRenderSession(scene, camera)
# convert output tensor to PIL Image and save
to_pil(rp.false_color_camera_space_normal()).save("procedural-normals.png")
Only 6 lines of code and we are done! The output should look like this:
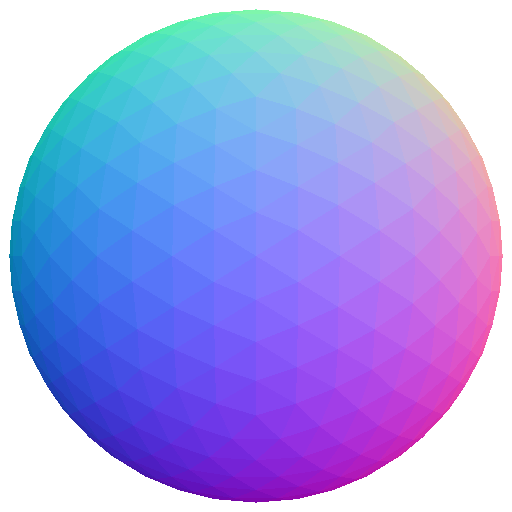
The GPU buffers can be replaced by arbitrary tensors or parameters, and the process has been fully differentiable.
Important
The SurfaceDeferredRenderSession is a “session”, which means you have to recreate it when you want to change the scene and/or the camera to avoid out-dated cached data.
Note
DiffRP makes heavy use of device-local caching. DiffRP operations do not support multiple GPUs on a single process. You will need to access the GPUs with a distributed paradigm, where each process only uses one GPU.
Next Steps#
It is recommended to go through the glTF rendering tutorial even if you do not need the functionality. It helps learning basic graphics concepts in DiffRP.
API Reference#
Note
All documented public APIs from submodules are available at the diffrp.* level except for resources and extension plugins.
Update Notes#
0.2.7: Fix depth transform bug in surface deferred rendering pipeline.
0.2.6: Added
quick-renderscript for previewing objects.0.2.5:
pippackaging.0.2.4: Loading from trimesh scene/mesh. Support more than 16M triangles and higher than 2K resolution with corresponding upstream nvdiffrast. More complete test suite.
0.2.3: Make submodule contents available at top level. Make context sharing mechanism thread-safe by default. Fix
torch.loadwarnings in newer torch versions.0.2.2: Fixed backward compatibility due to
staticmethod.0.2.1: Add metadata functionality.
0.2.0: Implemented path tracing pipeline.
0.1.5: Fix normal and tangent attributes in static batching, refactoring to extract logic shared across rendering pipelines.
0.1.4: Faster GLTF loading, static batching support, minor GPU memory optimizations.
0.1.3: Fix instanced GLTF material loading (GPU memory explosion issue).
0.1.2: Fix numerical stability of coordinate transform backward.
0.1.1: Performance and documentation improvements.
0.1.0: A major rewrite of the whole package. Will try to provide backward compatibility of all documented public APIs from this version on.
0.0.2: Minor improvements.
0.0.1: First verion, fully experimental.