Writing a Material#
Most rendering requirements can be fulfilled by only coding the material by implementing a diffrp.materials.base_material.SurfaceMaterial.
DiffRP is designed with modularity and extendability in mind. All interfaces are in the simple form of PyTorch function calls. For the default interpolator implementations, tensors you see in SurfaceInput will have shape (B, C) where B is batch number of pixels and C is the relevant channels, for example, positions and normals have 3 channels while RGBA colors have 4.
We show two examples: procedural effects and neural networks.
Procedural Effects#
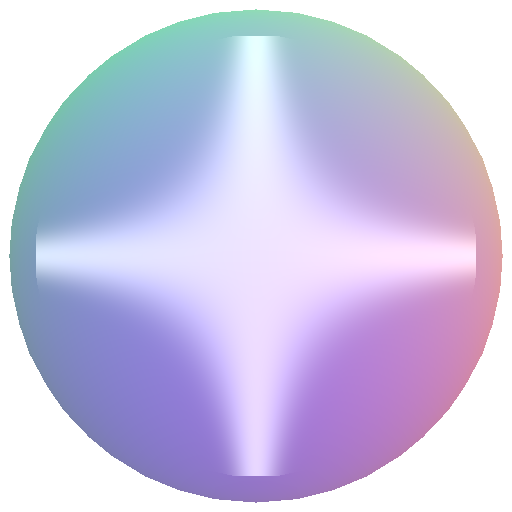
We implement a material where the RGB is defined as functions of the world space coordinates.
For points with z > 0.5, we additionally increase the values by a star-like shape.
Note that within DiffRP you can use the GLSL-like attributes to access slices in Tensors.
import torch
import diffrp
from diffrp.utils import *
class ProceduralMaterial(diffrp.SurfaceMaterial):
def shade(self, su: diffrp.SurfaceUniform, si: diffrp.SurfaceInput) -> diffrp.SurfaceOutputStandard:
p = si.world_pos
r = torch.exp(torch.sin(p.x) + torch.cos(p.y) - 2)
g = torch.exp(torch.sin(p.y) + torch.cos(p.z) - 2)
b = torch.exp(torch.sin(p.z) + torch.cos(p.x) - 2)
v = torch.where(p.z > 0.5, 0.5 * torch.exp(-p.x * p.x * p.y * p.y * 1000), 0)
albedo = float3(r, g, b) + v
return diffrp.SurfaceOutputStandard(albedo=albedo)
We can use the quick-start example for visualization:
import diffrp
import trimesh.creation
from diffrp.utils import *
mesh = trimesh.creation.icosphere(radius=0.8)
scene = diffrp.Scene().add_mesh_object(diffrp.MeshObject(ProceduralMaterial(), gpu_f32(mesh.vertices), gpu_i32(mesh.faces)))
camera = diffrp.PerspectiveCamera(h=2048, w=2048)
rp = diffrp.SurfaceDeferredRenderSession(scene, camera)
to_pil(rp.albedo_srgb()).save("procedural-albedo.png")
Note that we convert the values from linear to sRGB for better visuals.
Neural Networks#
As the input and outputs are expect to be a batch of features, and they are already in native PyTorch tensor interfaces, it is quite easy to integrate a neural network in DiffRP. It is just like calling the other functions.
In this NeuralMaterial, we create a neural network and evaluate it for albedo output.
class NeuralMaterial(diffrp.SurfaceMaterial):
def __init__(self) -> None:
super().__init__()
self.net = torch.nn.Sequential(
torch.nn.Linear(3, 16),
torch.nn.SiLU(),
torch.nn.Linear(16, 16),
torch.nn.SiLU(),
torch.nn.Linear(16, 3),
torch.nn.Sigmoid()
).cuda()
def shade(self, su: diffrp.SurfaceUniform, si: diffrp.SurfaceInput) -> diffrp.SurfaceOutputStandard:
return diffrp.SurfaceOutputStandard(albedo=self.net(si.world_normal))
We use the same testing code:
mesh = trimesh.creation.icosphere(radius=0.8)
material = NeuralMaterial()
scene = diffrp.Scene().add_mesh_object(diffrp.MeshObject(material, gpu_f32(mesh.vertices), gpu_i32(mesh.faces)))
camera = diffrp.PerspectiveCamera(h=512, w=512)
rp = diffrp.SurfaceDeferredRenderSession(scene, camera)
to_pil(rp.albedo_srgb()).save("neural-albedo.png")
You can also back-propagate the result – it just works.
pred = rp.albedo_srgb()
torch.nn.functional.mse_loss(pred, torch.rand_like(pred)).backward()
print(material.net[0].weight.grad)
Output:
tensor([[ 4.9758e-05, 4.8679e-05, 3.0747e-04],
[-1.9968e-05, 1.7120e-06, 3.6997e-04],
[-1.5356e-05, 1.8661e-05, 1.6705e-04],
[-2.2664e-05, -1.2767e-05, -7.8220e-05],
[ 8.0282e-06, 1.1283e-05, -1.3932e-04],
[-3.6454e-06, 4.1644e-05, 2.5145e-04],
[-2.8950e-06, -8.8152e-06, -3.0734e-04],
[ 2.8373e-05, 2.3682e-05, 6.7197e-04],
[-2.3877e-05, 5.6425e-05, 5.7738e-04],
[ 4.8350e-05, -9.0493e-05, -1.0172e-03],
[-1.4312e-05, -4.0098e-05, 2.5461e-04],
[ 7.0399e-05, 2.5832e-05, 4.8466e-04],
[-3.7648e-05, -2.5028e-05, -1.4115e-04],
[ 7.4847e-05, 1.7914e-05, 5.5394e-04],
[ 3.1179e-06, -4.5348e-06, 1.2603e-05],
[ 7.7181e-05, 3.2846e-05, -7.4523e-04]], device='cuda:0')
In most cases, neural networks are agnostic to color spaces, so it will make little difference if we assume it is in sRGB or linear space (by converting or not converting the color space at output).
You may also apply losses on raw outputs from this neural network:
pred = rp.albedo()
torch.nn.functional.mse_loss(pred, torch.rand_like(pred)).backward()